1. Scaling a Pacemaker Cluster
1.1. Overview
In a basic Pacemaker high-availability cluster [1] each node runs the full cluster stack of Corosync and all Pacemaker components. This allows great flexibility but limits scalability to around 16 nodes.
To allow for scalability to dozens or even hundreds of nodes, Pacemaker allows nodes not running the full cluster stack to integrate into the cluster and have the cluster manage their resources as if they were a cluster node.
1.2. Terms
- cluster node
- A node running the full high-availability stack of corosync and all Pacemaker components. Cluster nodes may run cluster resources, run all Pacemaker command-line tools (crm_mon, crm_resource and so on), execute fencing actions, count toward cluster quorum, and serve as the cluster’s Designated Controller (DC).
- pacemaker-remoted
- A small service daemon that allows a host to be used as a Pacemaker node without running the full cluster stack. Nodes running pacemaker-remoted may run cluster resources and most command-line tools, but cannot perform other functions of full cluster nodes such as fencing execution, quorum voting, or DC eligibility. The pacemaker-remoted daemon is an enhanced version of Pacemaker’s local executor daemon (pacemaker-execd).
- pacemaker_remote
- The name of the systemd service that manages pacemaker-remoted
- Pacemaker Remote
- A way to refer to the general technology implementing nodes running pacemaker-remoted, including the cluster-side implementation and the communication protocol between them.
- remote node
- A physical host running pacemaker-remoted. Remote nodes have a special resource that manages communication with the cluster. This is sometimes referred to as the bare metal case.
- guest node
- A virtual host running pacemaker-remoted. Guest nodes differ from remote nodes mainly in that the guest node is itself a resource that the cluster manages.
Note
Remote in this document refers to the node not being a part of the underlying corosync cluster. It has nothing to do with physical proximity. Remote nodes and guest nodes are subject to the same latency requirements as cluster nodes, which means they are typically in the same data center.
Note
It is important to distinguish the various roles a virtual machine can serve in Pacemaker clusters:
- A virtual machine can run the full cluster stack, in which case it is a cluster node and is not itself managed by the cluster.
- A virtual machine can be managed by the cluster as a resource, without the cluster having any awareness of the services running inside the virtual machine. The virtual machine is opaque to the cluster.
- A virtual machine can be a cluster resource, and run pacemaker-remoted to make it a guest node, allowing the cluster to manage services inside it. The virtual machine is transparent to the cluster.
1.3. Guest Nodes
“I want a Pacemaker cluster to manage virtual machine resources, but I also want Pacemaker to be able to manage the resources that live within those virtual machines.”
Without pacemaker-remoted, the possibilities for implementing the above use case have significant limitations:
- The cluster stack could be run on the physical hosts only, which loses the ability to monitor resources within the guests.
- A separate cluster could be on the virtual guests, which quickly hits scalability issues.
- The cluster stack could be run on the guests using the same cluster as the physical hosts, which also hits scalability issues and complicates fencing.
With pacemaker-remoted:
- The physical hosts are cluster nodes (running the full cluster stack).
- The virtual machines are guest nodes (running pacemaker-remoted). Nearly zero configuration is required on the virtual machine.
- The cluster stack on the cluster nodes launches the virtual machines and immediately connects to pacemaker-remoted on them, allowing the virtual machines to integrate into the cluster.
The key difference here between the guest nodes and the cluster nodes is that the guest nodes do not run the cluster stack. This means they will never become the DC, initiate fencing actions or participate in quorum voting.
On the other hand, this also means that they are not bound to the scalability limits associated with the cluster stack (no 16-node corosync member limits to deal with). That isn’t to say that guest nodes can scale indefinitely, but it is known that guest nodes scale horizontally much further than cluster nodes.
Other than the quorum limitation, these guest nodes behave just like cluster nodes with respect to resource management. The cluster is fully capable of managing and monitoring resources on each guest node. You can build constraints against guest nodes, put them in standby, or do whatever else you’d expect to be able to do with cluster nodes. They even show up in crm_mon output as nodes.
To solidify the concept, below is an example that is very similar to an actual deployment we test in our developer environment to verify guest node scalability:
- 16 cluster nodes running the full Corosync + Pacemaker stack
- 64 Pacemaker-managed virtual machine resources running pacemaker-remoted configured as guest nodes
- 64 Pacemaker-managed webserver and database resources configured to run on the 64 guest nodes
With this deployment, you would have 64 webservers and databases running on 64 virtual machines on 16 hardware nodes, all of which are managed and monitored by the same Pacemaker deployment. It is known that pacemaker-remoted can scale to these lengths and possibly much further depending on the specific scenario.
1.4. Remote Nodes
“I want my traditional high-availability cluster to scale beyond the limits imposed by the corosync messaging layer.”
Ultimately, the primary advantage of remote nodes over cluster nodes is scalability. There are likely some other use cases related to geographically distributed HA clusters that remote nodes may serve a purpose in, but those use cases are not well understood at this point.
Like guest nodes, remote nodes will never become the DC, initiate fencing actions or participate in quorum voting.
That is not to say, however, that fencing of a remote node works any differently than that of a cluster node. The Pacemaker scheduler understands how to fence remote nodes. As long as a fencing device exists, the cluster is capable of ensuring remote nodes are fenced in the exact same way as cluster nodes.
1.5. Expanding the Cluster Stack
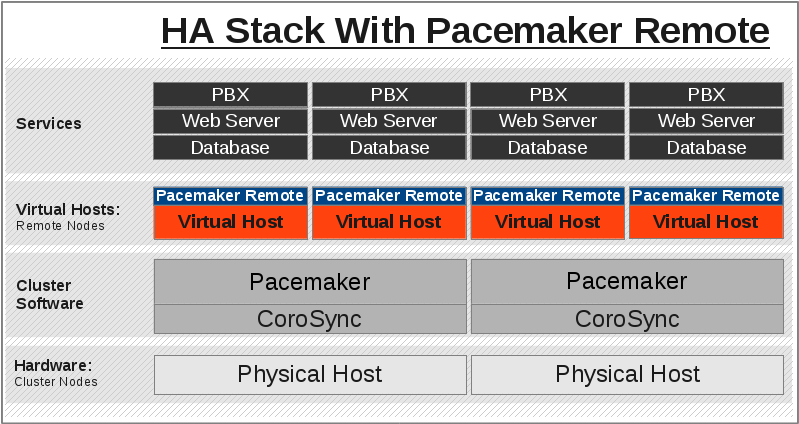
With pacemaker-remoted, the traditional view of the high-availability stack can be expanded to include a new layer:
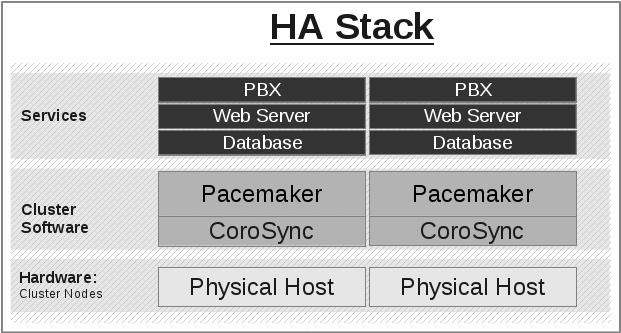
1.5.1. Traditional HA Stack
1.5.2. HA Stack With Guest Nodes
| [1] | See the https://www.clusterlabs.org/doc/ Pacemaker documentation, especially Clusters From Scratch and Pacemaker Explained. |